The Goal:
In the summer of 2025, my friend Danielle Schwartz and I embarked on an open ended project to explore and implement concepts from the classroom. We decided on exploring the world of submersible robots and see if we could make a functional Remote Operated Vehicle (ROV).
Project Description:
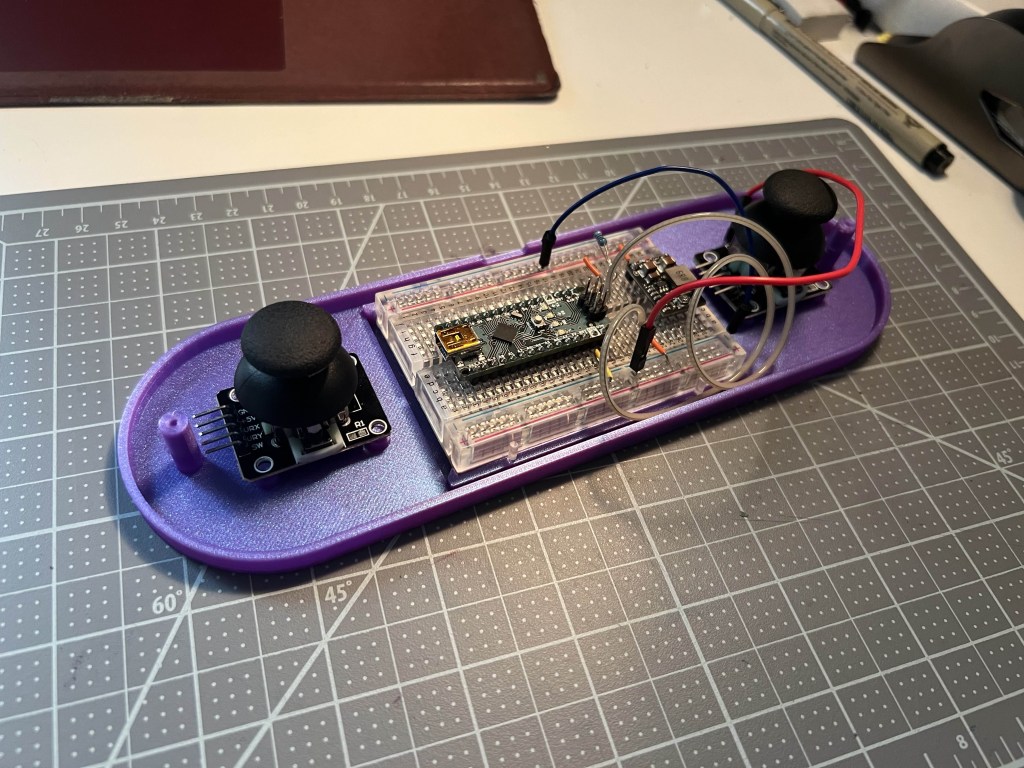
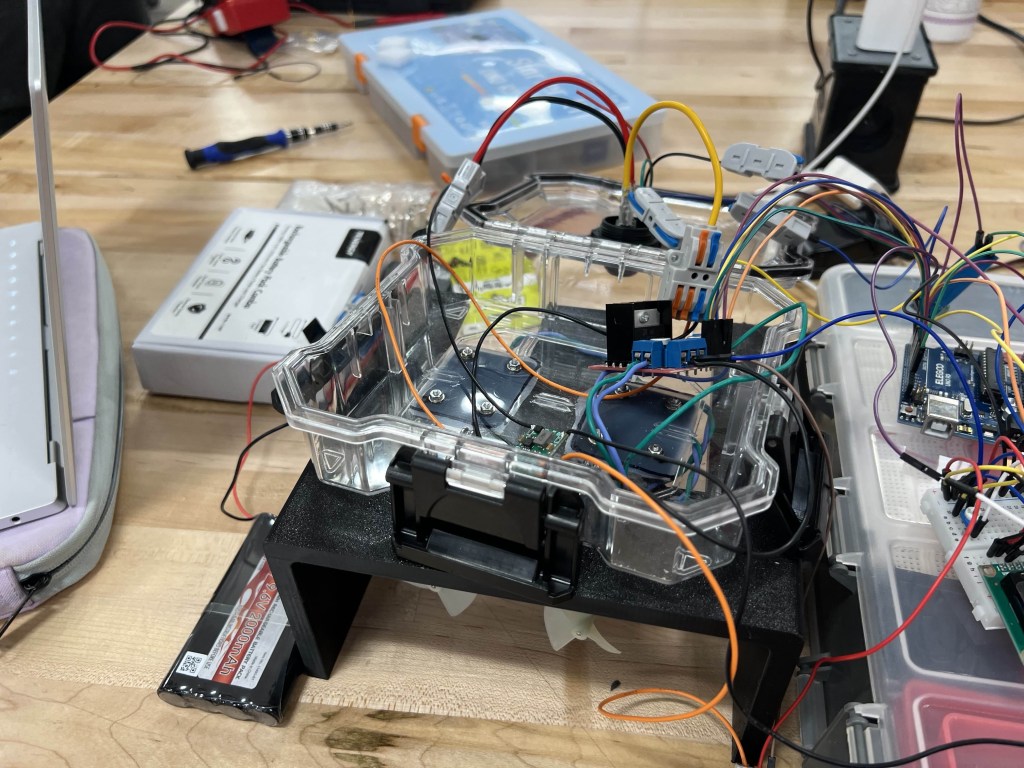
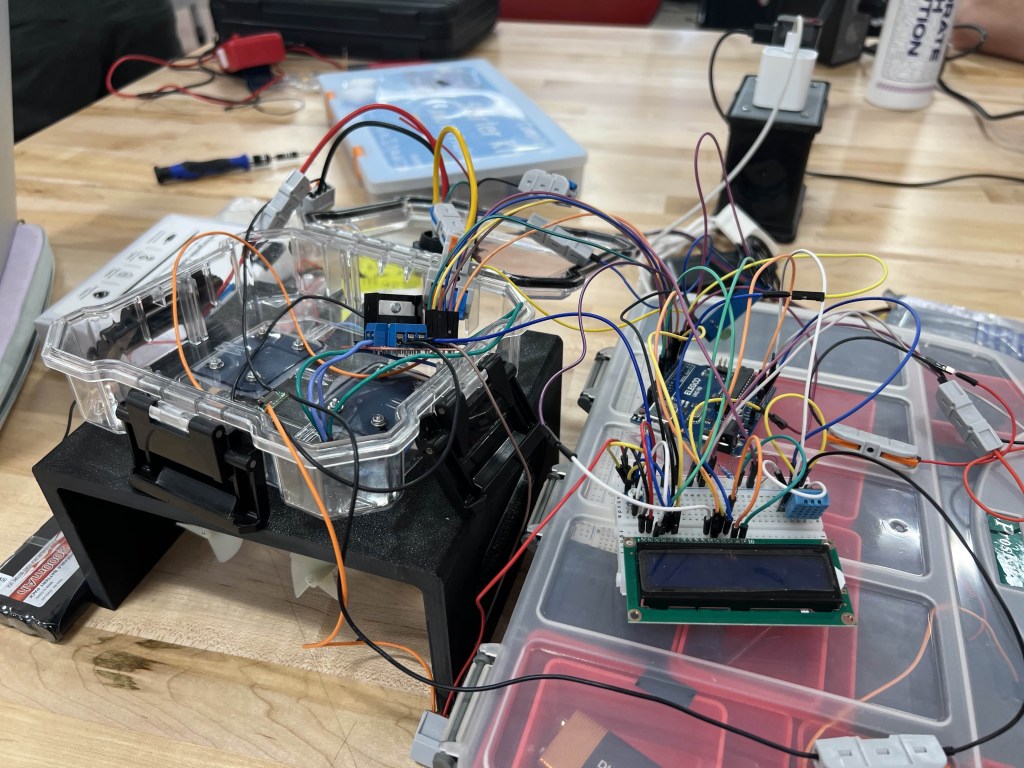
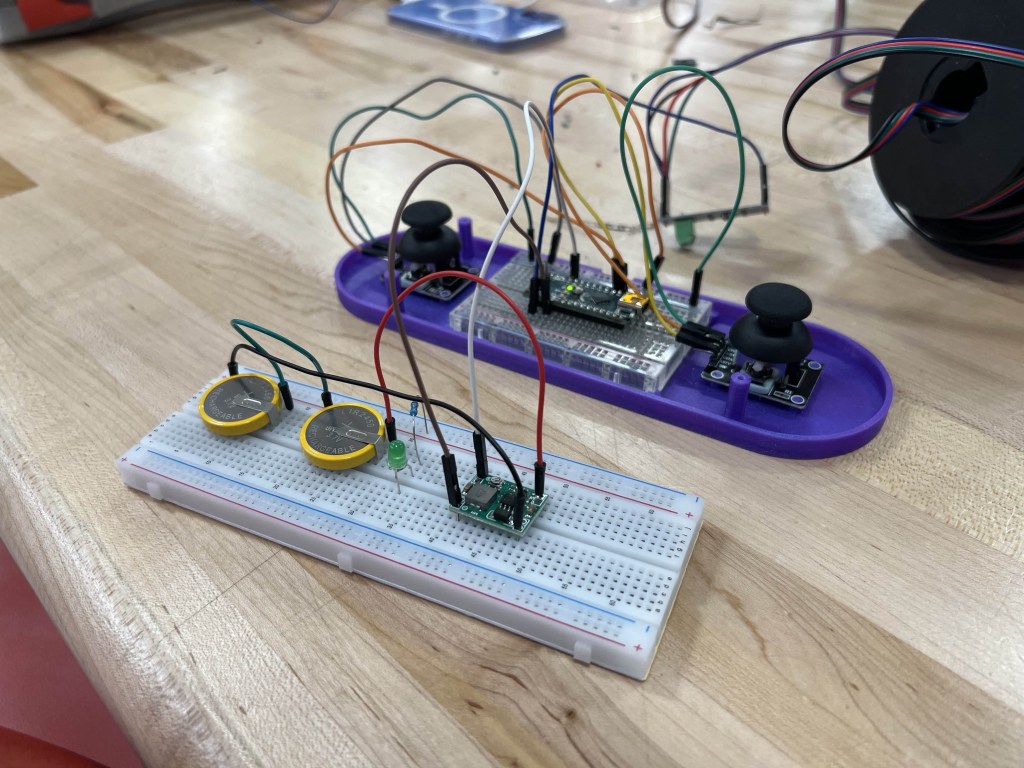
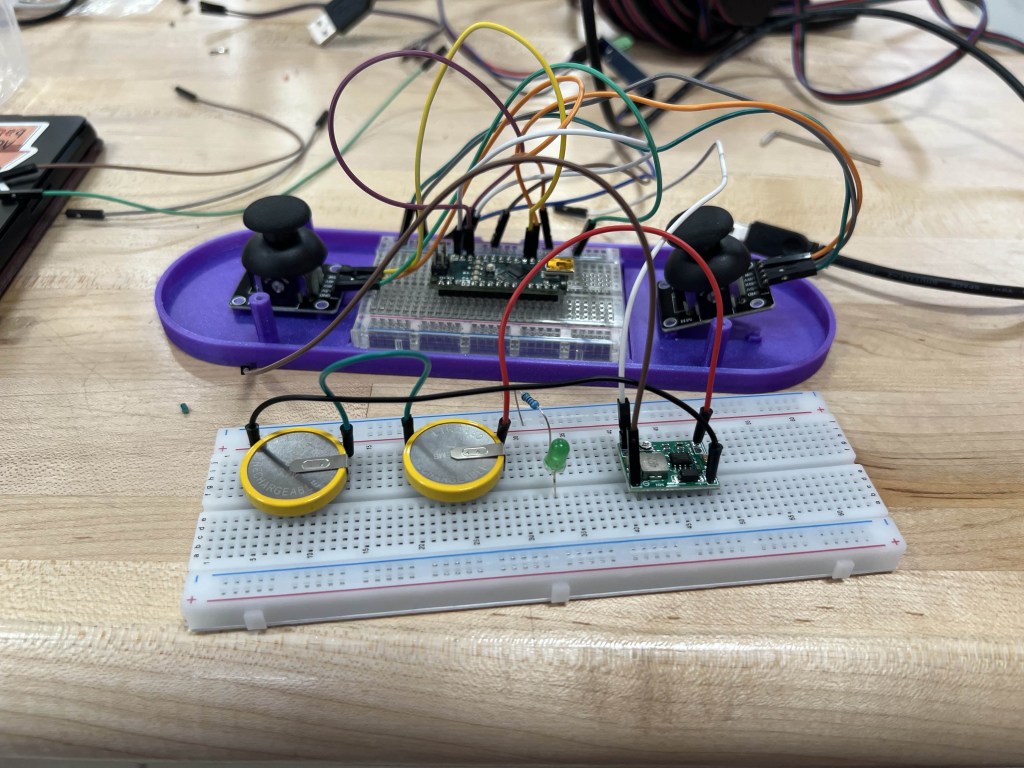
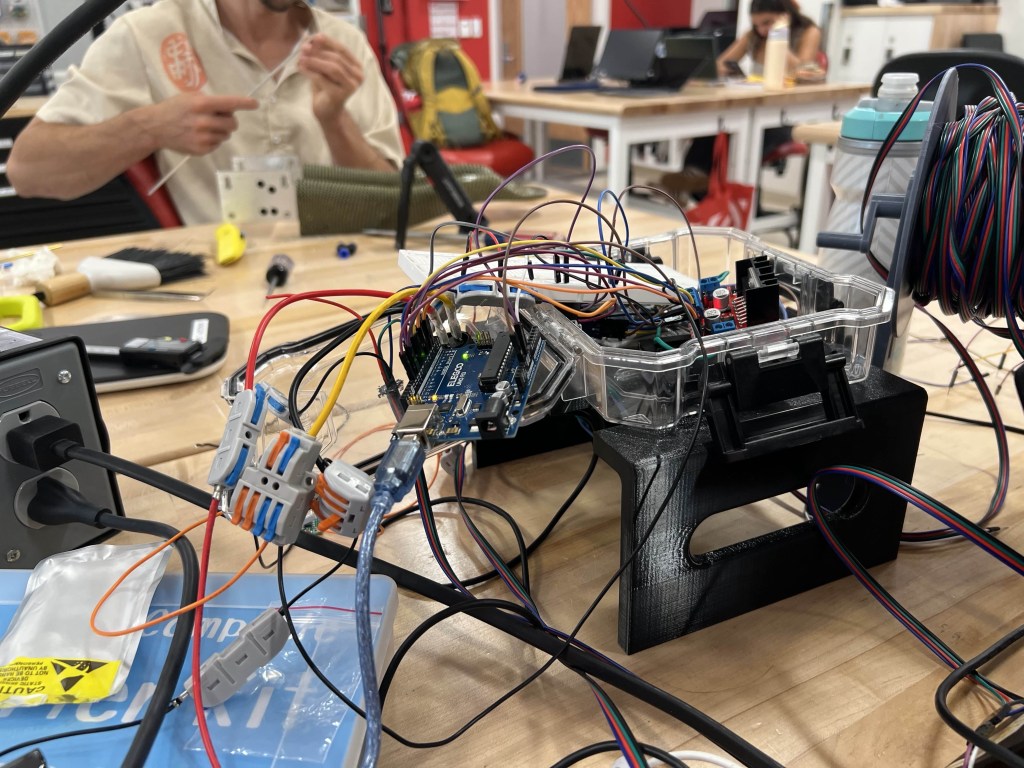
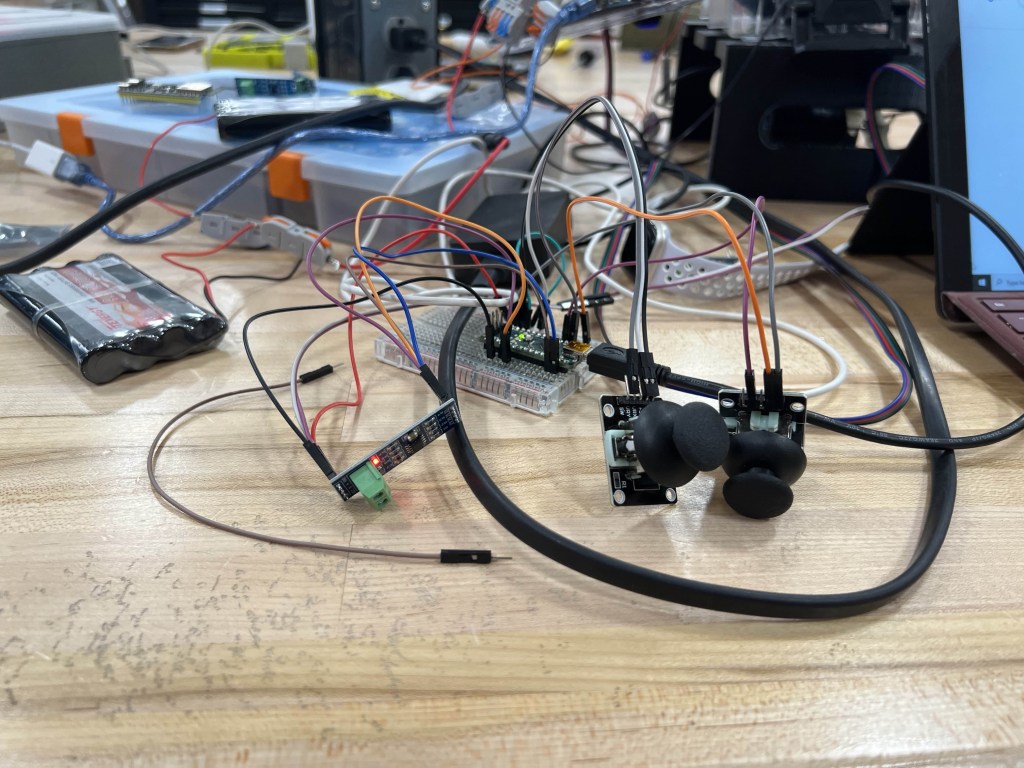
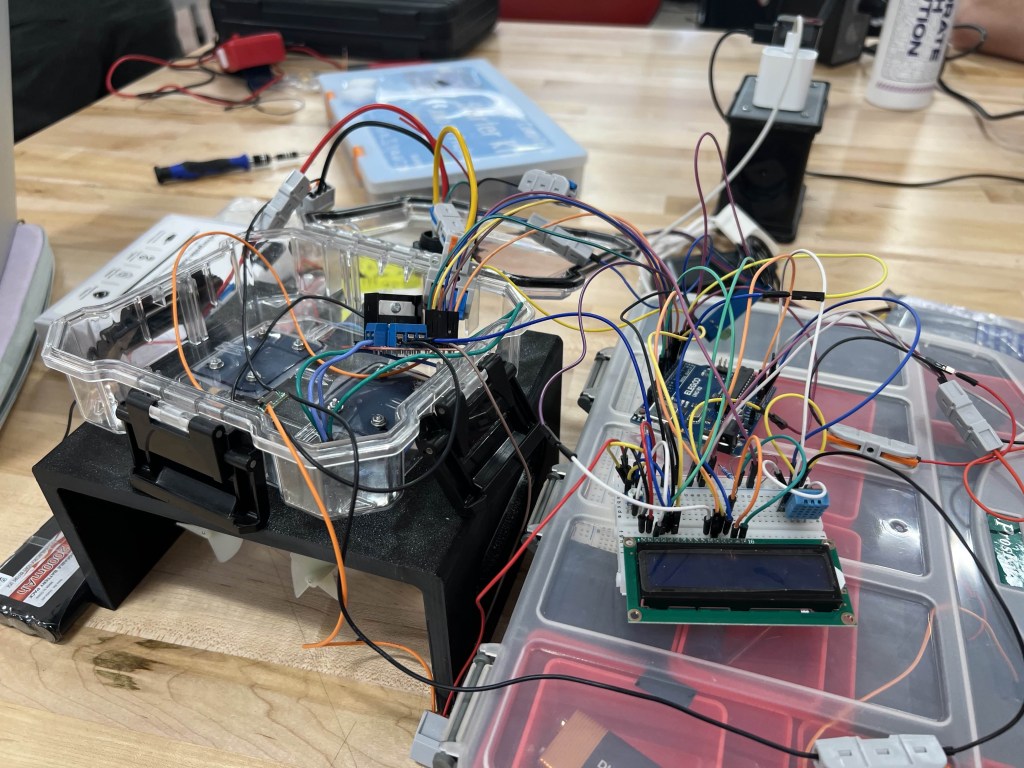
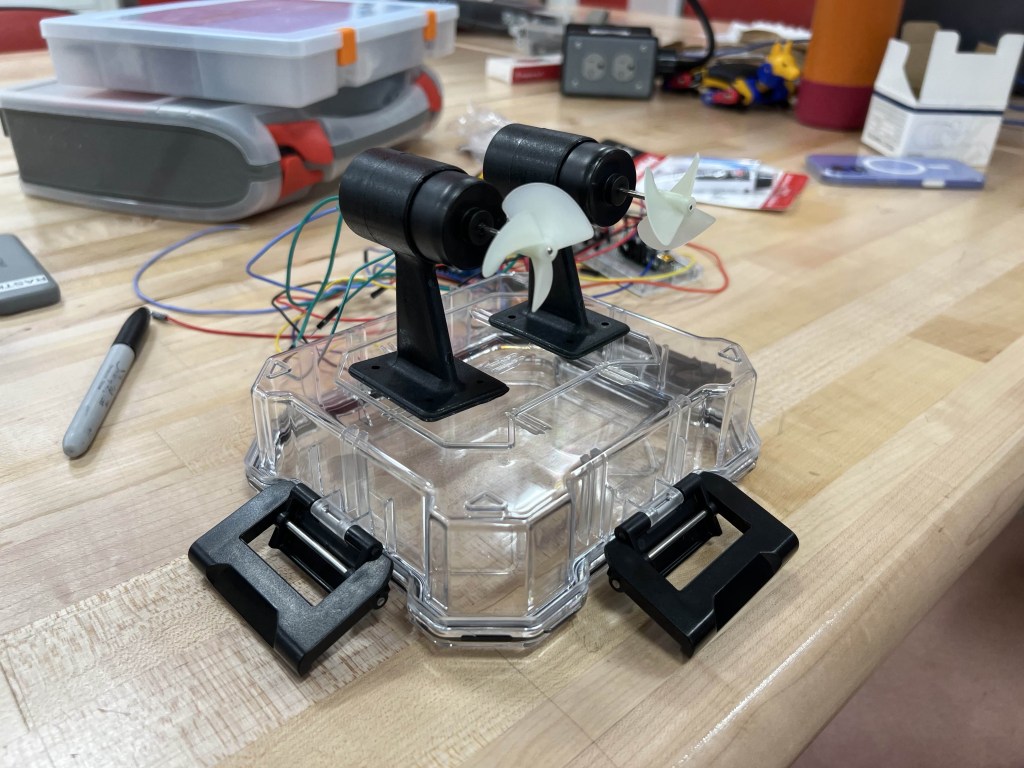
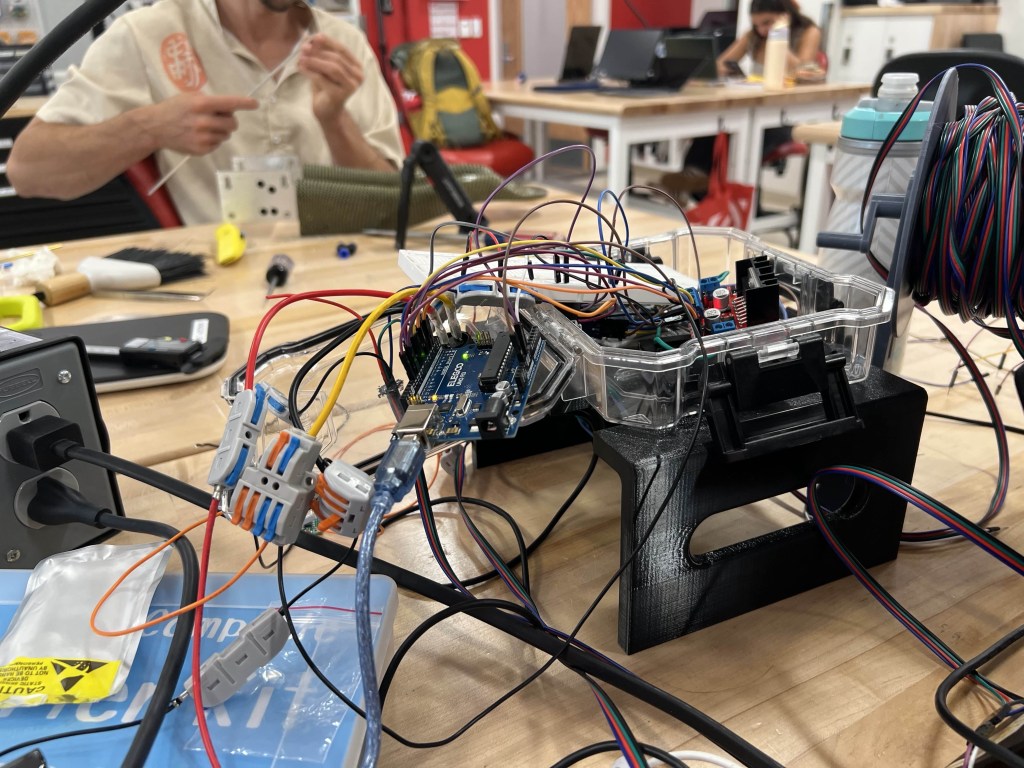
ANGLER is a simple design: with a chassis made out of a commercially available waterproof box, the only external components of the robot are its 12v propeller motors, the power switch, a water temperature sensor, and the tether connecting ANGLER to our remote controller. Within the chassis sits the motor controller, an LCD readout screen for sensor readings, the battery packs, and the Arduino microcontroller. We did not have depth control on ANGLER, since this was our first foray into ROVs, and thus we relied on the chassis’s buoyancy to keep it afloat. Our goal was to deploy ANGLER in an Olympic sized swimming pool and navigate around and collect temperature readings of the water.
What went right:
After drilling holes in the box to mount the motors (and thus making our waterproof box water susceptible), we designed silicone gaskets that formed a watertight seal between the motor and the chassis. Our initial tests were very promising and after full assembly and trouble shooting, ANGLER was buoyant and able to generate a decent amount of thrust.
What went wrong:
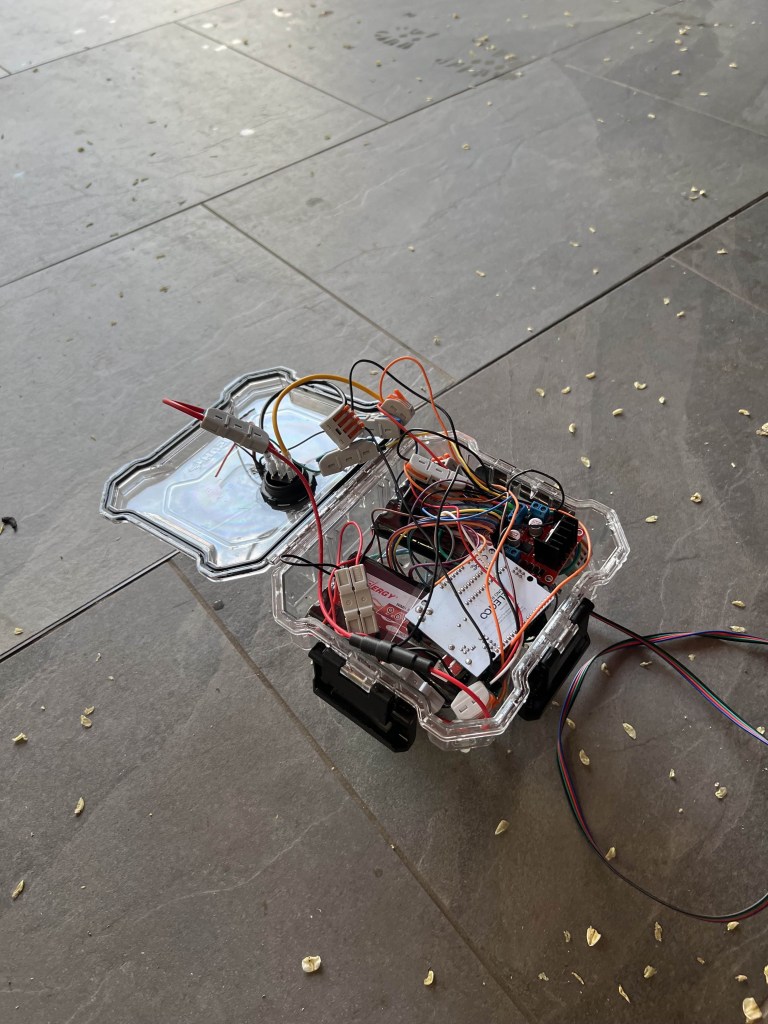
While the initial tests were promising and the full assembly worked well at first, there was one critical design parameter we forgot to design for: heat. While we were running tests in the water to see how fast ANGLER could move, the internal temperature within the waterproof chassis rose dramatically. What followed was a lesson in thermodynamics that my partner nor I will ever forget: the motor controller fried and began to smoke. On seeing the smoke, we quickly switched ANGLER off and brought its smoking remains outdoors to cool down.
A temperature reading taken while it was outdoors measured the internal temperature of the chassis components to be around 300 degrees Celsius.
Outcome:
We learned a lot about engineering design as well as trouble shooting unforeseen outcomes. Even though we couldn’t fully test ANGLER in the pool like we had wanted, we hope to take what we have learned in this project into a new model, adding both thermal regulation and an internal buoyancy control.