The Goal:
In March 2026, two Boston University clubs, HackHardware and Women in Data Science, put on the Hack and Blast Hackathon which had one goal: design and build a functioning robot in 2 weeks. Most came to the first meeting with a team already made and registered, but my two teammates and myself arrived without a formed team or project goal in mind. Therefore the three of us found ourselves together designing an RC car with a toy dart gun mounted on the top in the “Tank Track” competition. Thus, Perry the Tank-apus was born, named for the Phineas and Ferb cartoon character Perry the Platypus.
Project Description:
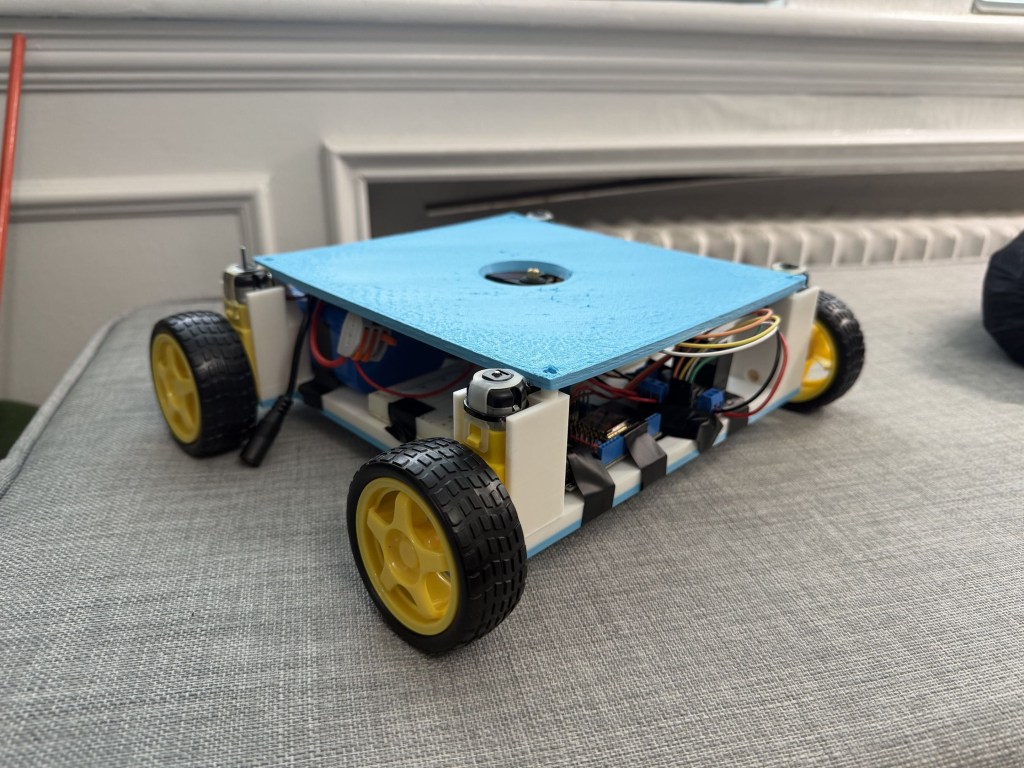
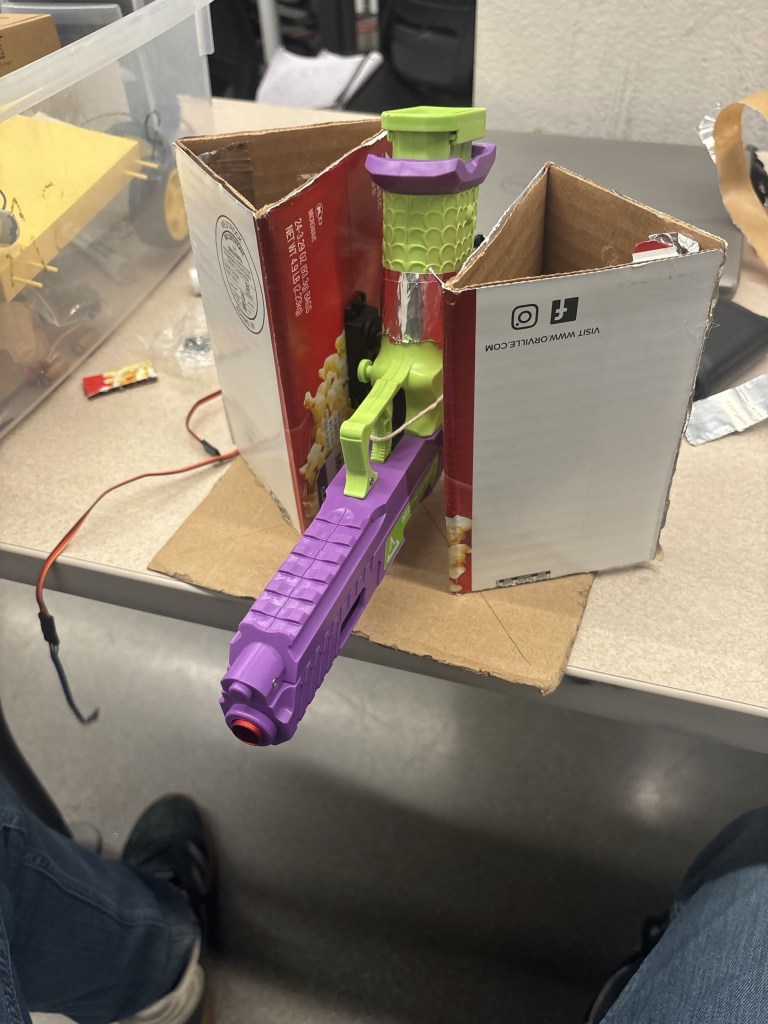
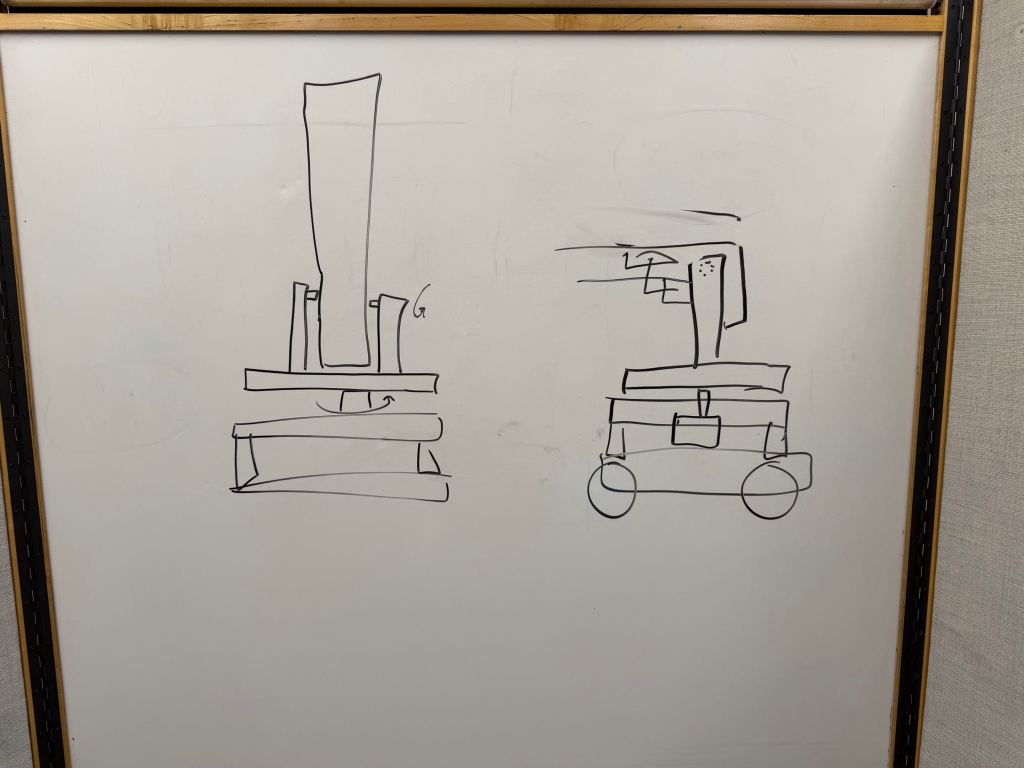
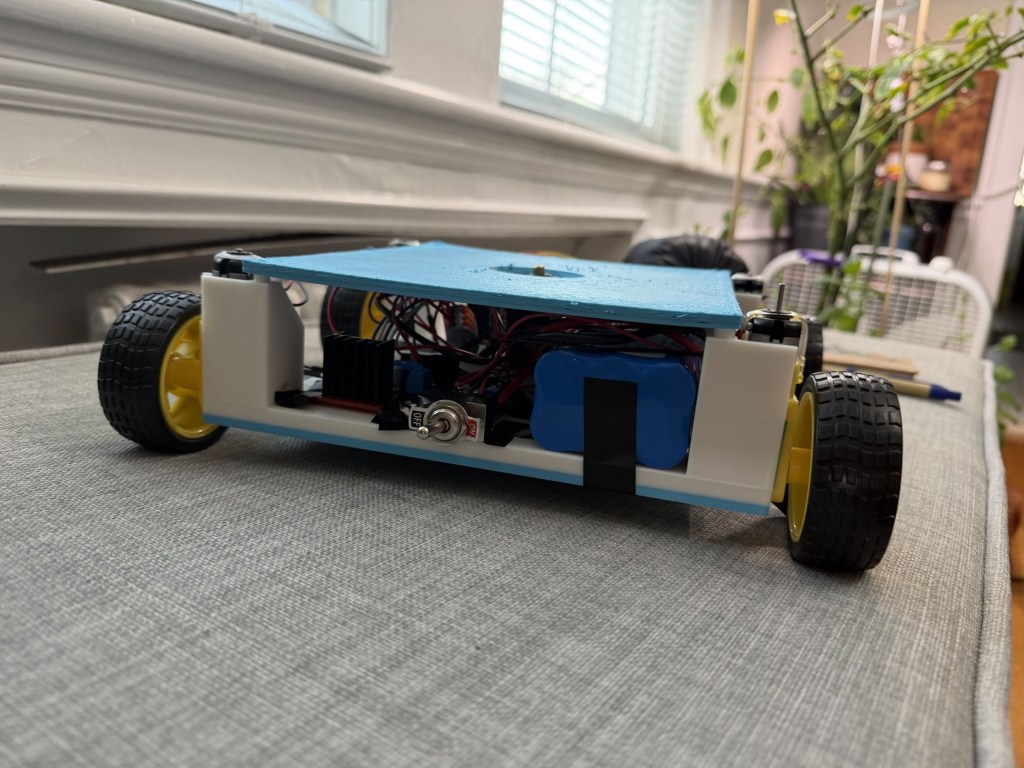
Perry’s design is meant to be sweet and simple: a rectangular base with a motor for each of the four wheels, two L298N H-Bridge motor drivers, two high torque servo motors for aiming the ‘cannon’ on top with two degrees of freedom, a third servo to pull the trigger, a PS3 video game controller to issue remote commands, and an ESP32 microcontroller to run the C++ program. The base was designed with a ‘floor’ to hold the electronics, and a ‘ceiling’ to hold the cannon away from the electronics and to provide additional stability to the cannon as it rotated.
What went right:
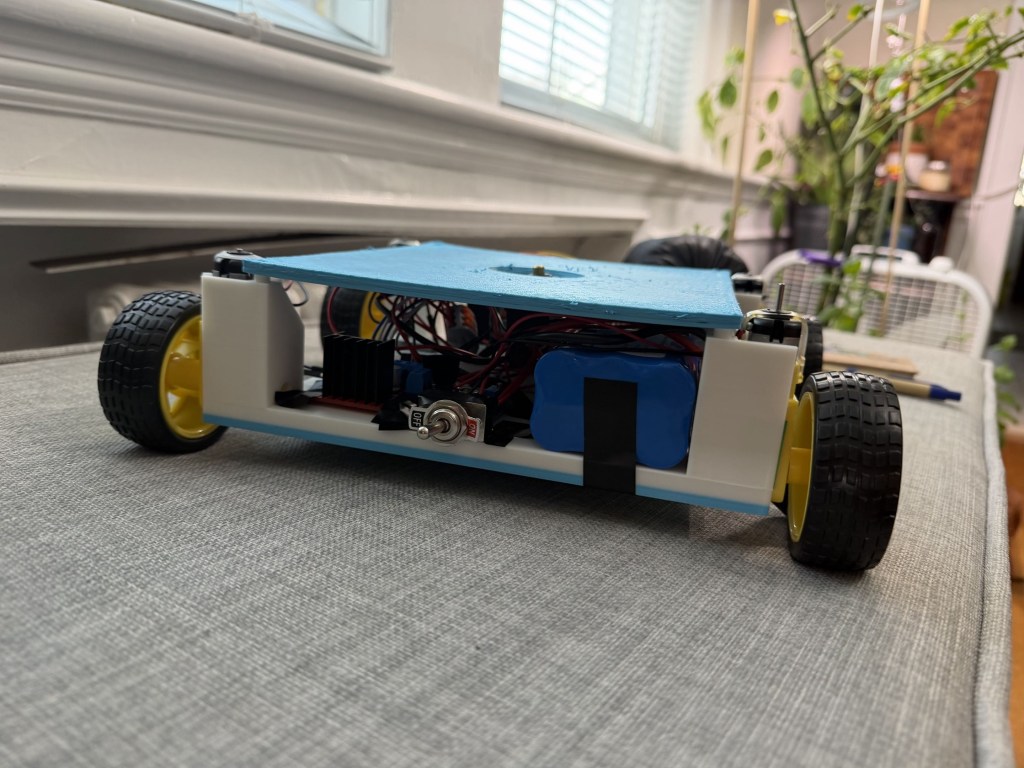
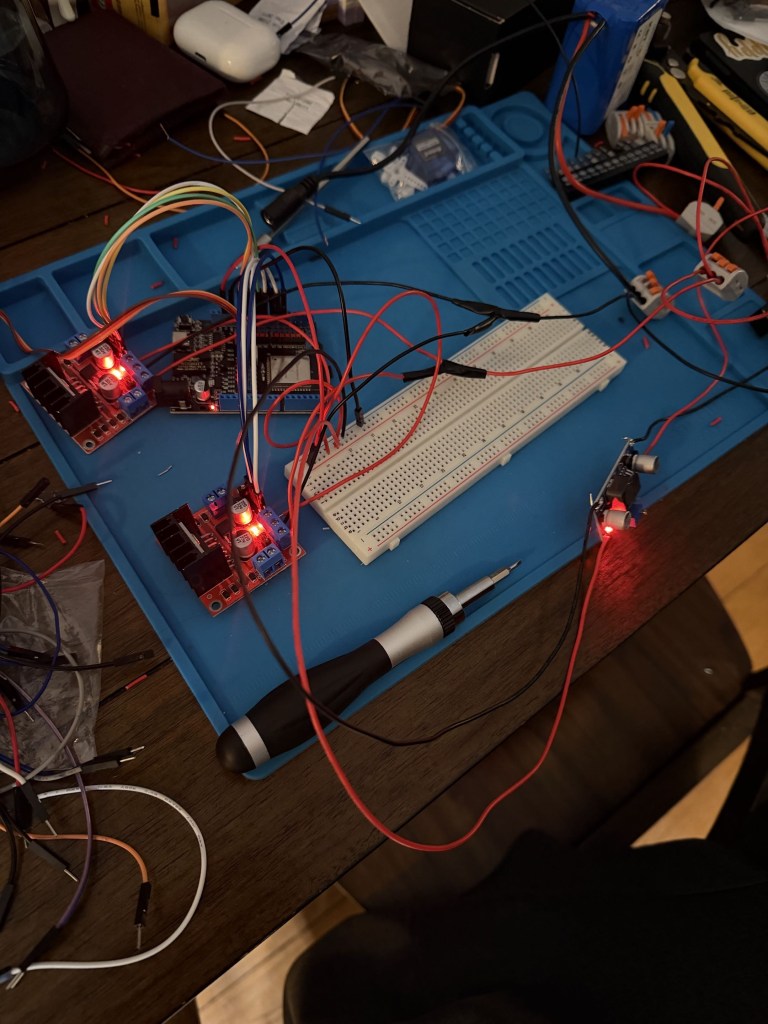
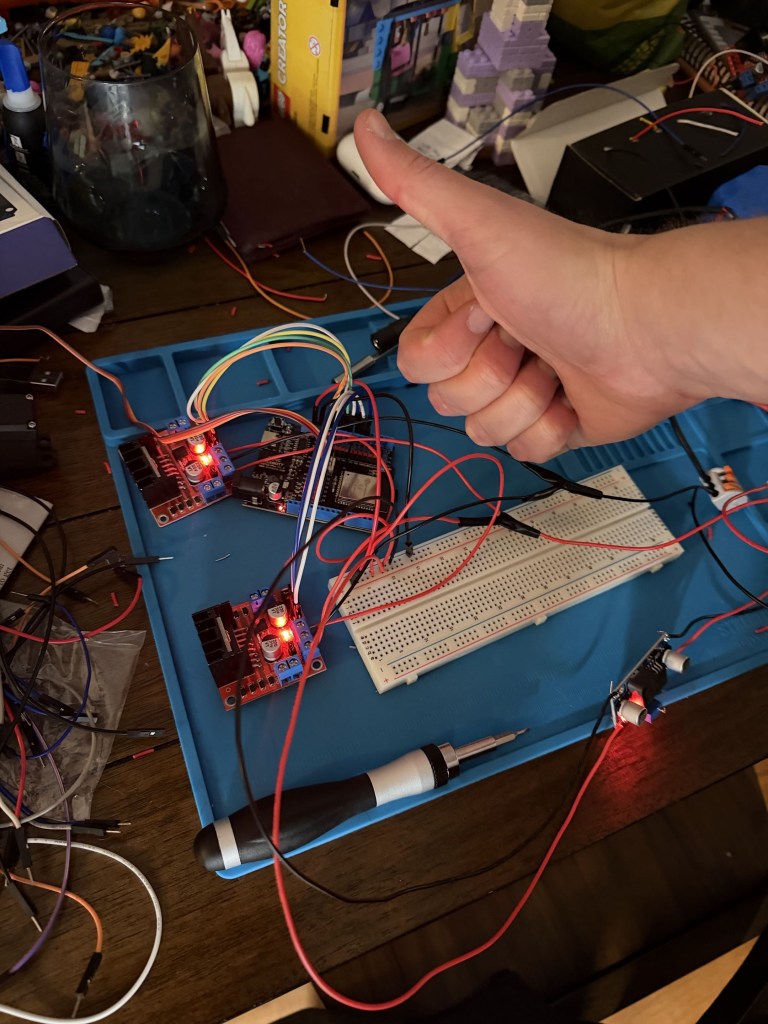
Although we had only two weeks for this project, my teammates and I quickly divided the work between the three of us, each playing to our strengths: the mechanical engineer designed the initial chassis, the biomedical engineer with experience in robotics designed the cannon, and I, the electrical engineer, managed the wiring, coding, and Bluetooth connection of the PS3 remote and the ESP32. Learning from ANGLER, I embarked on the wiring layout with heat dissipation in mind, making sure to keep the sides of the tank open and have the L298N motor controller near to the edge to get better airflow.
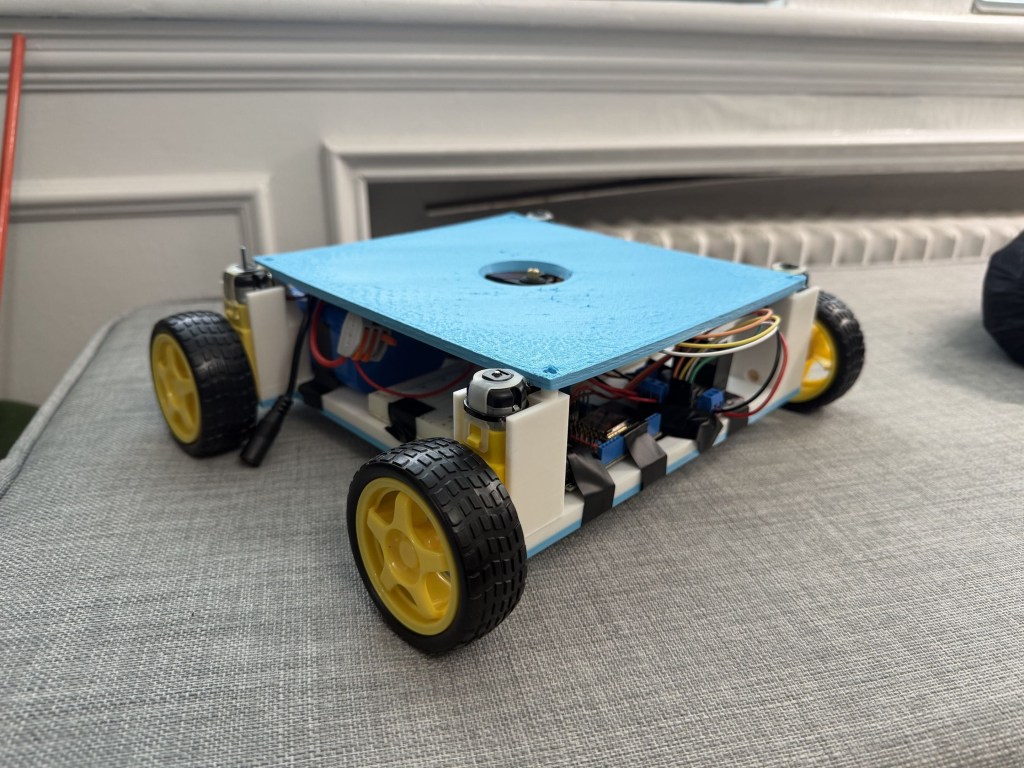
The final version of Perry the Tank-apus looks different from our initial designs, but it accomplishes much of what we set out to do, namely to have the tank drive, turn, and aim and fire the cannon.
What went wrong:
As with many projects and hackathons that are on a tight timeline, our final product was not what we had initially intended. Plagued by scheduling conflicts, our team lacked cohesion and accountability for the work that we were doing. As such, when we came together a few days before the end of the event, the different aspects of the project were not at the same points in their production. Namely, the code was mostly completed and the wireless communication between the PS3 controller and the ESP32 had finally been established (which took me many hours of labor and digging through libraries on GitHub), the base for the robot had not been improved from the prototype and the cannon was still in the design phase. With one of our teammates leaving for a sports competition, we switched into high gear and set up shop in a university conference room to build what we could. I modified and reprinted the base while my other teammate worked more on the cannon. Together, combined with some late night wiring and overnight printing, we were able to create the final version of Perry the Tank-apus that you see.
Outcome:
The final version of Perry the Tank-apus was not what we had initially envisioned, nor did it have all of the functionality that we wanted. There were many factors that affected our results: midterms drawing time away, lack of accountability to one another, less time to troubleshoot problems with the deployment, and, for me personally, getting the Bluetooth controller to properly connect to the ESP32 and taking many more hours than I had thought that it would. However, we learned from these setbacks and for our next project I know to prioritize accountability and sticking to an agreed timeline.
We have plans to come back together and finish Perry the Tank-apus and make its design more tidy.